軟弱野菜自動収穫ロボット実用化研究開発
- 課題番号
- 27021C
- 研究グループ
- 信州大学、カイシン工業(株)、(株)西澤電機計器製作所、全国農業協同組合連合会、エムスクウェア・ラボ(株)
- 研究総括者
- 信州大学工学部 千田 有一
- 研究タイプ
- 現場ニーズ対応型 Aタイプ
- 研究期間
- 平成27年~29年(3年間)
- PDF版
- 軟弱野菜自動収穫ロボット実用化研究開発(PDF : 969.5KB)
1 研究の目的・終了時達成目標
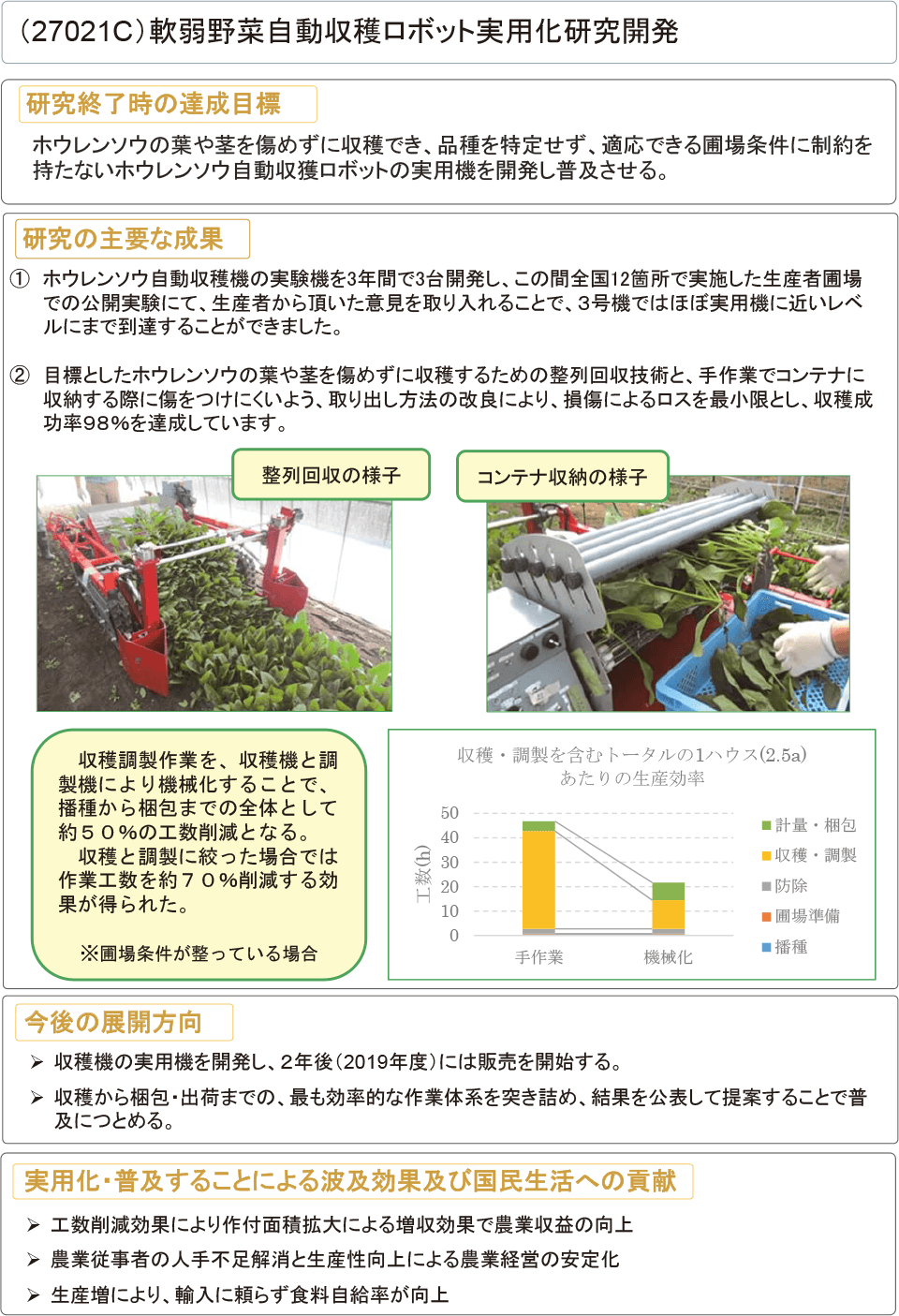
ホウレンソウなど軟弱野菜の栽培では、収穫・調製にかかる時間が全作業時間の大半を占めるため、収穫精度が高い軟弱野菜自動収穫ロボットの実用化が待ち望まれている。しかしながら、既存の自動収穫装置では、葉や茎を傷めずに収穫できる割合が低い、特定の品種しか収穫できない、適応できる圃場条件に制約が有るなどの課題があった。これらの課題を解決できるホウレンソウ自動収穫機を開発することを目的とし、実用化を目指す。
2 研究の主要な成果
(1) 実用化を目指した試験装置を各年度につき1台開発し、ホンレンソウ生産圃場において、性能評価を実施。
(2) 向きを揃えて自動収穫する技術を開発し、ホウレンソウを傷つけずに自動収穫することが可能となった。
(3) 条に沿った直進走行技術は、条の境界に追従制御するためのアルゴリズムを構築し、圃場実験によって追従可能であることを確認した。収穫機に搭載することで自律走行による収穫の可能性を確認した。
(4)作業効率の効果を作業時間計測等によって客観的に評価した。
公表した主な特許・品種・論文
(1) 特願2016-174343 特許名 野菜自動収穫機(出願人:信州大学)
(2) 特願2016-227591 特許名 葉菜類の収穫機(出願人:カイシン工業株式会社 信州大学)
(3) 千田有一.ニューカントリー(軟弱野菜収穫ロボット),北海道協同組合通信社(2015)
3 開発した技術・成果の実用化・普及の実績及び今後の展開
(1)向きを揃えて自動収穫する技術など、試験装置での3年間の研究成果をもとに、実用機を複数台製作し、普及見込み地域で生産者の協力を得て、収穫する際に収穫機を使用してもらい、実使用での不具合点を抽出。更なる改良を加え、普及に向けた量産体制を整える。
(2)収穫だけでなく、調製と梱包を含めた一連の作業について、市場に出ている装置を活用したり、独自で開発する等により、最も効率的な作業体系を突き詰め、効果を公表する。
【今後の開発・普及目標】
(1) 2年後(2019年度)は、ホウレンソウ収穫機をリリースする。
(2) 5年後(2022年度)は、ホウレンソウ収穫機に特化した生産地域を構築する。
(3) 最終的には、提案した収穫~梱包までの作業体系が、稲刈り機のように広く普及する。
4 開発した技術・成果が普及することによる波及効果及び国民生活への貢献
(1) 収穫ロボットと調製機を使用することで71%の工数削減効果があり、削減した工数を作付面積の拡大につなげ、生産性を倍にできれば、売り上げとして1,254億円増やす経済効果をもたらす。
(2) 農業従事者の人手不足対策、生産性の向上および安定した農業経営の実現に寄与。
(3) 農業・農村の多面的機能の維持・発揮、食料自給率・自給力の維持向上が期待できる。
この研究成果を活用しませんか?
この研究に関するご相談や質問等は、以下よりお問い合わせいただけます。
信州大学
学術研究院(工学系)工学部 機械システム工学科 千田有一
TEL 026-269-5150
同じ分野の研究成果
PDF形式のファイルをご覧いただく場合には、Adobe Readerが必要です。
Adobe Readerをお持ちでない方は、バナーのリンク先からダウンロードしてください。
![]()